Current Loop History
Many of us still remember the days of pneumatic control; some of us still use pneumatic control systems. Ratio controllers, PID controllers, temperature sensors and actuators are powered by compressed air. Three to fifteen pounds per square inch is the modulation standard, 3 psi for alive zero and 15 psi for 100%. Any pressure below 3 psi was a dead zero and an alarm condition.
In the 1950s, electric and electronic controls made their debut. Four to twenty mA signaling emulated the 3 to 15 psi pneumatic signal. Wires are easier to install and maintain than pneumatic pressure lines, energy requirements are a lot lower; you no longer need a twenty to fifty horsepower compressor and electronics allow for more complicated control algorithms.
Current Loop Basics
The 4 to 20mA current loop is a very robust sensor signaling standard. Current loops are ideal for data transmission. All the signaling current flows through all components; the same current flows even if the wire terminations are less than perfect. All the components in the loop drop voltage due to the signaling current flowing through them.
The signaling current is not affected as long as the power supply voltage is greater than the sum of the voltage drops around the loop at the maximum signaling current of 20mA.
Figure 1 shows a schematic of the simplest 4 to 20mA current loop. There are four components,
1. A DC power supply;
2. A 2-wire transmitter;
3. A receiver resistor that converts the current signal to a voltage; and
4. The wire that interconnects it all. Two Rwires exist since you have a wire out to the sensors and another back.

Current supplied from the power supply flows through the wire to the transmitter. The transmitter regulates the current flow. The transmitter only allows a current proportional to the measured parameter to flow, called the loop current. The current flows back to the controller through the wire.
The loop current flows through Rreceiver to ground and returns to the power supply. The current flowing through Rreceiver produces a voltage that is easily measured by an analog input. For a 250Ω resistor, the voltage will be 1 VDC at 4 mA and 5VDC at 20mA.
Current Loop Components
Power Supply
Power supplies for 2-wire transmitters must always be DC. Since changing current flow representsthe parameter being measured, AC cannot be used. If AC were used, the current would be changing all the time and the signal representing the measured parameter could not be distinguished from that caused by the AC power. Common power supply voltages are 36 VDC, 24 VDC, 15 VDC and 12 VDC. Power supplies for 3-wire transmitters can be either AC or DC. The most common AC voltage supply is the 24 VAC control transformer. Be sure to check any transmitter’s installation literature for proper voltages.
Transmitter
The transmitter is the heart of the 4 to 20mA signaling system. It changes a physical property such as temperature, humidity or pressure into an electrical signal. The signal is a current proportional to the physical property being measured. 4mA represents the low end of the measurement range and 20mA represents the high end. The transmitter consumes 7 to 15 VDC of loop voltage, depending on model, to power itself. BAPI specifies the power to our current transmitters as a range, 15 to 24 VDC for a BA/H200 or 7 to 40VDC for a BA/T1K. The lower voltage is the minimum voltage necessary to guarantee propertransmitter operation. The higher voltage is the maximum voltage the transmitter can withstand and operate to its stated specifications.
Receiver Resistor
It is much easier for to measure voltage than current. Running the loop current through a resistor converts the current into a voltage. In Figure 1, Rreceiver is a precision resistor that has well defined characteristics, the chief of which is resistance. The most common resistance used is 250Ω. Depending upon application resistances of 100Ω to 750Ω may be used.
Wire
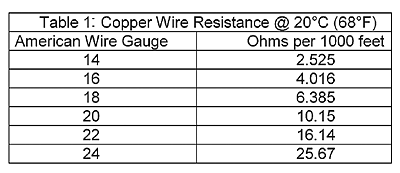
Sending current through wire produces voltage drops proportional to the wire length. All wire has resistance, usually expressed in Ohms per 1,000 feet. The voltage drop can be calculated using Ohm’s law. In 1825 Georg Simon Ohm discovered that the current through electrically conductive materials is directly proportional to the potential difference applied across the material. In 1827 when Ohm published his findings, the Experts of the day said that Ohm’s findings were a “web of naked fancies.”
Today, we know Ohm’s work as Ohm’s Law, the formula states; current times resistance is voltage. The formula can be written as:
E = I * R
Where E is the voltage across the resistance in volts, I is the current flowing through the conductor in amperes and R is the conductor’s resistance in Ohms. (The Greek letter capital omega, Ω, commonly represents Ohms.) Unlike in Ohm’s day, now we have standard wire gauges with well-defined resistances. Wire resistances for common wire gauges are shown in Table 1.
Insensitivity to Electrical Noise
The greatest advantage is a current loop’s inherent insensitivity to electrical noise. Every current transmitter has some output resistance associated with it. Ideally, from elementary electronics theory, the current transmitters output resistance should be infinite. Since real world transmitters are made from electronics parts and not text books, they have very large but not infinite output resistances. For example, the BA/T1K has an output resistance of 3,640,000 Ohms or 3.64 MegΩ. The output resistance may be modeled as a resistor.
Figure 2 below schematically shows the component resistances with a noise source added to the loop. The output that your controller sees is the voltage across Rreceiver. If the noise source has an amplitude of 20 Volts, then the error seen across Rreceiver is;
Verror = 20*(250/(10+3,640,000+250) = 0.0014 volts
The voltage across Rreceiver at 20mA is five volts. 0.0014 volts is 0.028% of five volts, an insignificant error.
The high output impedance of the BA/T1K rejects errors due to power supply fluctuations. If the power supply of Figure 1 is varied such that the voltage dropped across the transmitter varies from 7 to 24 VDC, the output current only changes by 0.000005 amps, or 5 micro-amps. 5 micro-amps is 0.031% of the total signal swing. Since large output resistances inherently reject more noise and power supply fluctuations, be assured that when you measure a parameter with a BAPI transmitter you will get the correct reading all the time.

If you need more information about 4 to 20 mA current loops, call your BAPI representative or see the application notes “4 to 20 mA Current Loop Configurations” and “Designing 4 to 20 mA Current Loops”.

